- Tue Nov 24, 2009 3:26 pm
#85854
SparkFun has chosen to include a high pass filter on these modules (SEN-09413 and SEN-09423). As a result, you cannot integrate the output of these gyros to get an angle of rotation! The high pass filter removes the DC component, so the integral fails to produce the expected results.
The high pass filter has another effect as well. If you rotate one direction and stop, you will see (for a while) a different stationary reading than if you rotate in the other direction and stop.
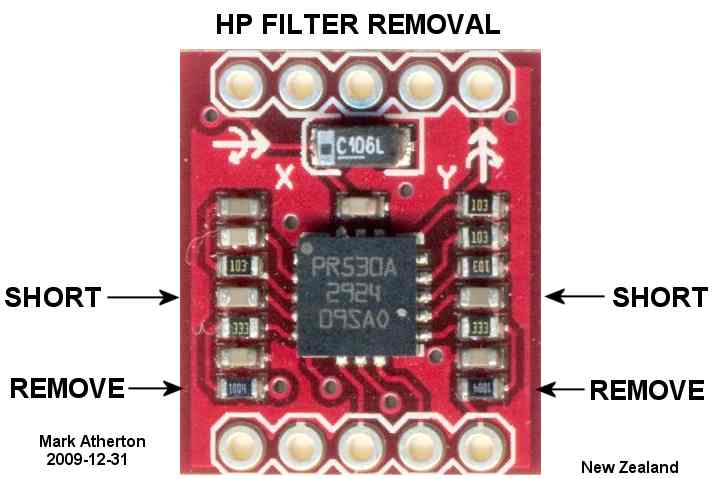
The HP filter can be removed (if you're good with a fine tip soldering iron) by removing R8 and R5 and replacing C1 and C2 with a wire jumper.
Once this is done, the two modules make excellent , stable gyros.
The high pass filter has another effect as well. If you rotate one direction and stop, you will see (for a while) a different stationary reading than if you rotate in the other direction and stop.
The HP filter can be removed (if you're good with a fine tip soldering iron) by removing R8 and R5 and replacing C1 and C2 with a wire jumper.
Once this is done, the two modules make excellent , stable gyros.
{kind=link}