- Mon Oct 13, 2014 7:33 am
#175831
Hi All!
First time poster, longtime SparkFun customer.
I'm going to buck the trend in this forum, and just document a project I'm working on. I'm sure I'll pose questions along the way, but my main goal here is to give myself some incentive to keep moving forward on this project.
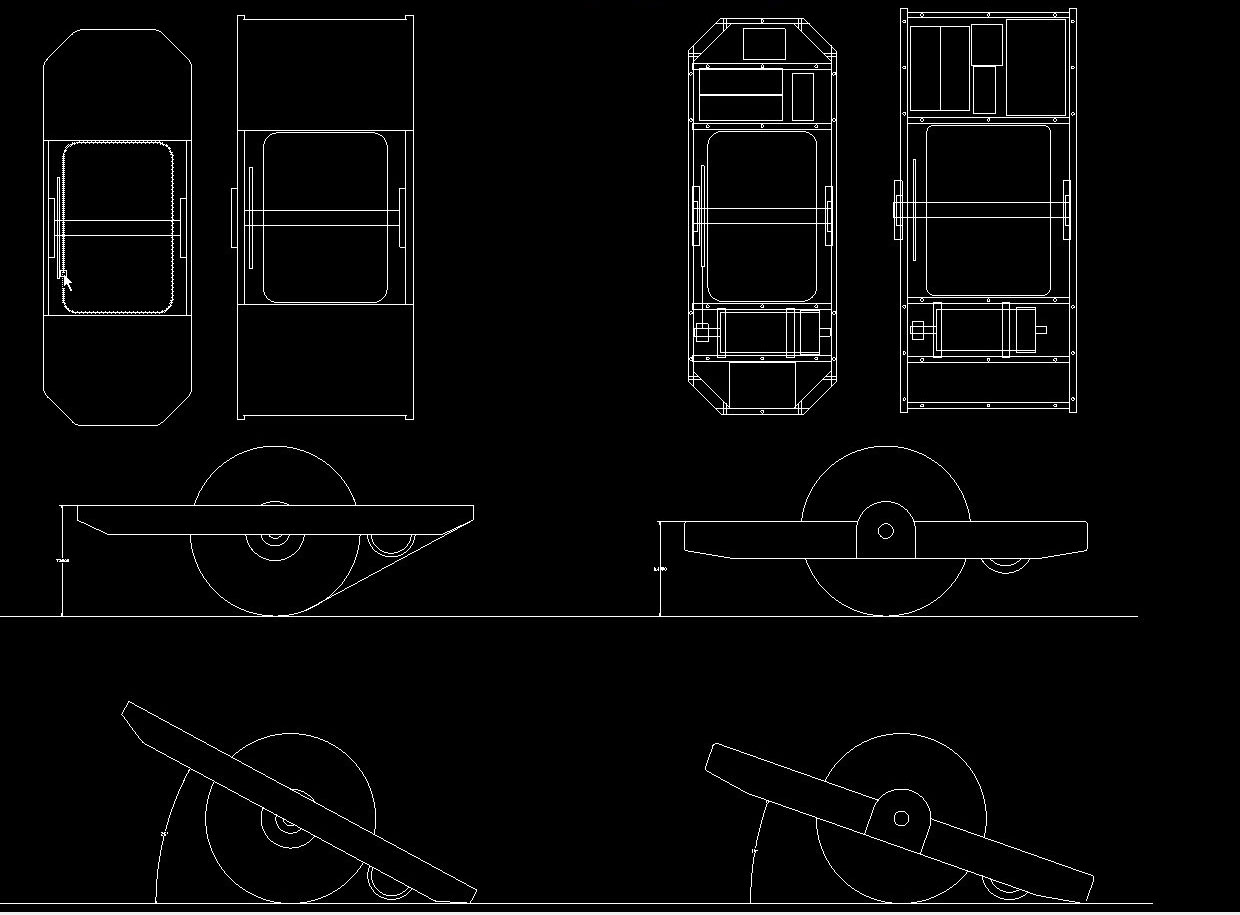
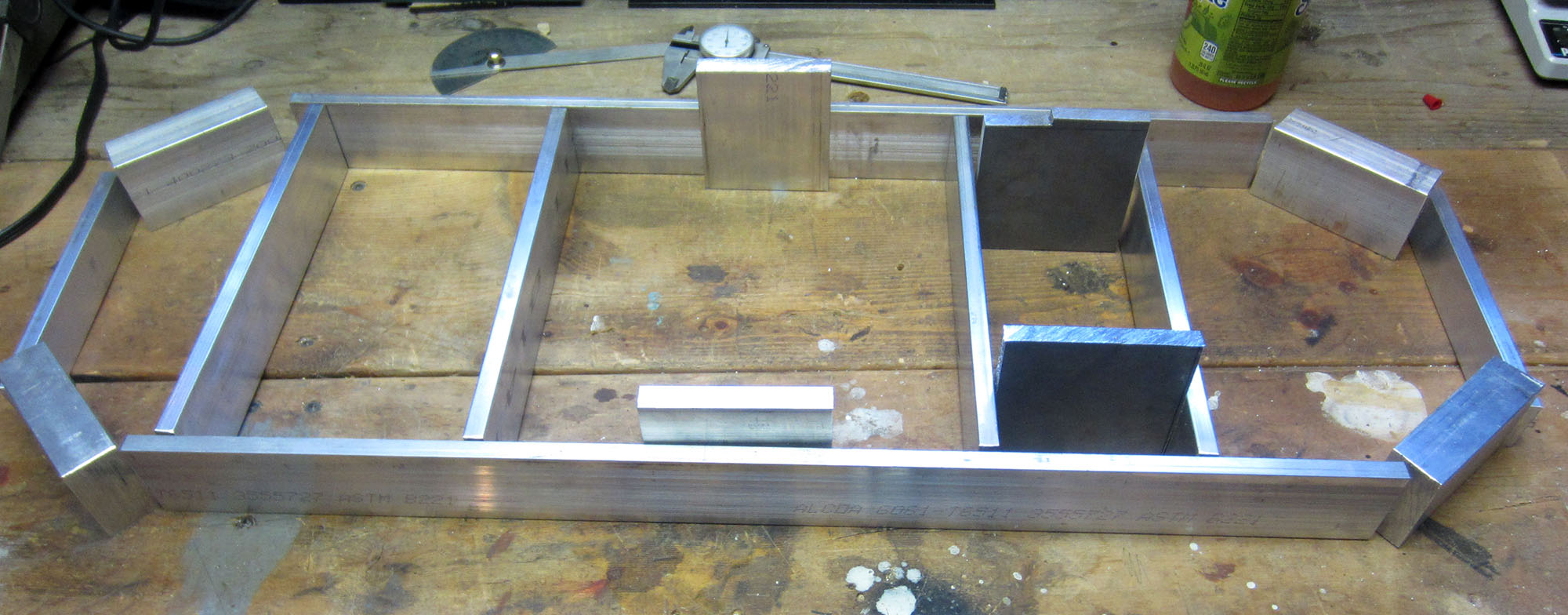
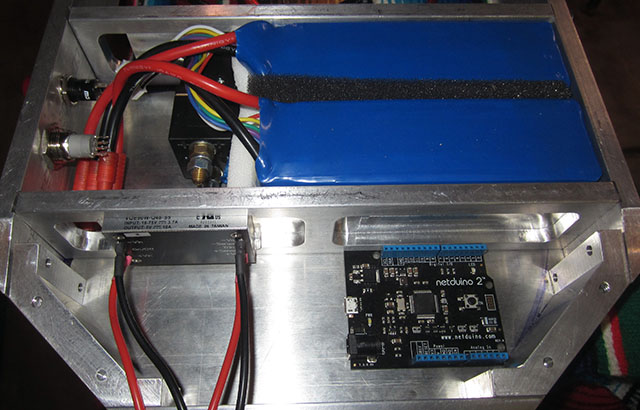
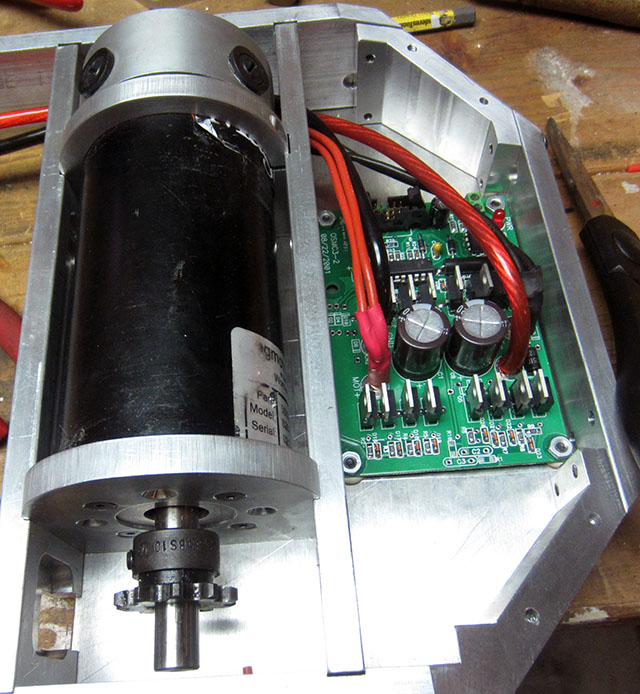
I'm starting to build the successor to a self balancing skateboard I made a few years back. An avid snowboarder, I wanted something to play with during the dry seasons here in Colorado. Plenty of people have made these before, but it seemed like a great project on many different levels. I documented it a bit here: http://teamcosmos.com/skateone/index.shtml. Video here: https://www.youtube.com/watch?v=rhfugvQB1jY. It used a Netduino and a 6 DOF IMU from Sparkfun, amongst other items.
It was a fun project, but as is typical, halfway through the project I was already thinking of the next version of the skateboard. As noted on the above site, there were a few issues that haunted the project: Minimal feedback from the skateboard, a difficult to access micro-controller, and physical layout issues that caused problems turning or climbing hills.
So the upgrade plans involve a few toys from SparkFun: An RGB LED strip that wraps around the skateboard, some bright LEDs for headlights, a Bluetooth module, and an Infrared receiver. I'll use the LED Strip to indicate things like speed, direction, angle, etc. I'll dump a lot of data out via the Bluetooth module, and allow modification of key variables via Bluetooth as well. The infrared receiver will allow me to tweak settings when I don't have a laptop or phone handy.
Pete
First time poster, longtime SparkFun customer.
I'm going to buck the trend in this forum, and just document a project I'm working on. I'm sure I'll pose questions along the way, but my main goal here is to give myself some incentive to keep moving forward on this project.
I'm starting to build the successor to a self balancing skateboard I made a few years back. An avid snowboarder, I wanted something to play with during the dry seasons here in Colorado. Plenty of people have made these before, but it seemed like a great project on many different levels. I documented it a bit here: http://teamcosmos.com/skateone/index.shtml. Video here: https://www.youtube.com/watch?v=rhfugvQB1jY. It used a Netduino and a 6 DOF IMU from Sparkfun, amongst other items.
It was a fun project, but as is typical, halfway through the project I was already thinking of the next version of the skateboard. As noted on the above site, there were a few issues that haunted the project: Minimal feedback from the skateboard, a difficult to access micro-controller, and physical layout issues that caused problems turning or climbing hills.
So the upgrade plans involve a few toys from SparkFun: An RGB LED strip that wraps around the skateboard, some bright LEDs for headlights, a Bluetooth module, and an Infrared receiver. I'll use the LED Strip to indicate things like speed, direction, angle, etc. I'll dump a lot of data out via the Bluetooth module, and allow modification of key variables via Bluetooth as well. The infrared receiver will allow me to tweak settings when I don't have a laptop or phone handy.
Pete