- Mon Jun 30, 2014 12:14 pm
#172331
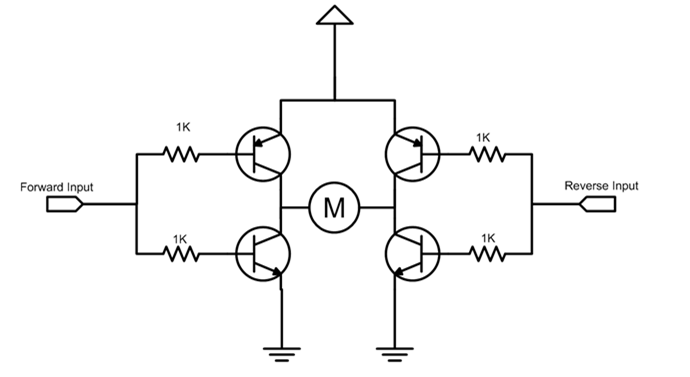
Is there anyway for me to control an DC motor with just 2 wires, reversing the polarity on them, and considering that the voltage between them is not enough to actually drive the motor? I though of something like and H-bridge made out of transistors, controled by another group of transistors, but I'm not sure of how I could do it.