- Wed May 23, 2012 3:43 am
#144899
Hi All.
If you have purchased the sparkfun "LSM303 Breakout Board - Tilt Compensated Compass" and, like I did, expect it to give you a compass heading out of the box simply by using the example code provided by sparkfun then this post might help you out...
Summary:
If you are finding the sparkfun provided example code gives you a very faulty compass heading then you need to use the pololu code linked below to calibrate the device.
https://github.com/pololu/LSM303
More info:
After receiving this device I tried various things to get a good compass heading; indoor testing, outdoor testing, 3.3v, 5v, arduino mega, arduino mini pro, moving it away from my wacom tablet, etc. The only thing that made a noticeable difference was keeping the compass at least a meter or two from my wacom tablet. Sitll, however, the compass heading was off.
I found that the North and South were close to 0º and 180º but that East and West were around -55º and +55º ,respectively, off where they should be. These results suggested a calibration issue rather than a sensor fault so I did some further research.
After reading the post linked below I followed Mee_n_Mac's 'sanity' checks, which involve pointing the x axis towards magnetic north,then E,S and W and recording the magnetometer X,Y and Z value for each.
viewtopic.php?f=14&t=28591&p=128200&hil ... ty#p128200
The results:
Next I used the pololu calibration code to find the min and max values for each axis of the magnetometer. The values for this particular sensor were:
X: min = -733, max = +379
Y: min = -530, max = 518
Z: min = -533, max = 468
Once these values were entered into the pololu heading example sketch the LSM303DLH started giving accurate heading info.
To further understand the magnetometer readings I made rough rotations of the device around each axis and recorded the X,Y and Z values. I then made recorded the values whilst making a series of random rotations. Using grapher, included with os x, I plotted these results:
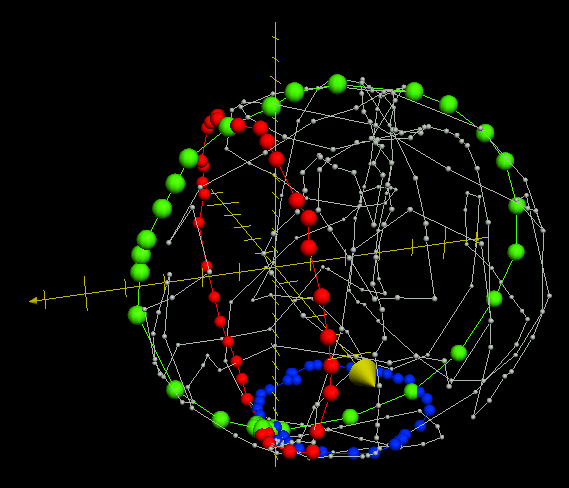
The application notes pdf has a lot of info as to what this graph means (page 27 onwards), but as I undertand it the fact the points resemble a sphere rather than an ellipsoid suggests there is very little soft-iron interference.
On a final note if you are looking for buy the LSM303DLH then also look into the more recent LSM303DLM which has a greater accuracy.
The compass is now working properly so I'm happy!
If you have purchased the sparkfun "LSM303 Breakout Board - Tilt Compensated Compass" and, like I did, expect it to give you a compass heading out of the box simply by using the example code provided by sparkfun then this post might help you out...
Summary:
If you are finding the sparkfun provided example code gives you a very faulty compass heading then you need to use the pololu code linked below to calibrate the device.
https://github.com/pololu/LSM303
More info:
After receiving this device I tried various things to get a good compass heading; indoor testing, outdoor testing, 3.3v, 5v, arduino mega, arduino mini pro, moving it away from my wacom tablet, etc. The only thing that made a noticeable difference was keeping the compass at least a meter or two from my wacom tablet. Sitll, however, the compass heading was off.
I found that the North and South were close to 0º and 180º but that East and West were around -55º and +55º ,respectively, off where they should be. These results suggested a calibration issue rather than a sensor fault so I did some further research.
After reading the post linked below I followed Mee_n_Mac's 'sanity' checks, which involve pointing the x axis towards magnetic north,then E,S and W and recording the magnetometer X,Y and Z value for each.
viewtopic.php?f=14&t=28591&p=128200&hil ... ty#p128200
The results:
Code: Select all
From the above results you can see the Y axis is behaving well. When Y is pointing north it reads 240 and when pointing south it reads -240. However the X axis is not behaving as it should, reading 30 when pointing north and -480 pointing south. This offset explained why I was getting perfect heading on one axis but not the other. X Y Z
X pointing North: 30 5 -490
X pointing East: -220 240 -470
X pointing South: -480 30 -430
X pointing West: -250 -240 -450
Next I used the pololu calibration code to find the min and max values for each axis of the magnetometer. The values for this particular sensor were:
X: min = -733, max = +379
Y: min = -530, max = 518
Z: min = -533, max = 468
Once these values were entered into the pololu heading example sketch the LSM303DLH started giving accurate heading info.
To further understand the magnetometer readings I made rough rotations of the device around each axis and recorded the X,Y and Z values. I then made recorded the values whilst making a series of random rotations. Using grapher, included with os x, I plotted these results:
The application notes pdf has a lot of info as to what this graph means (page 27 onwards), but as I undertand it the fact the points resemble a sphere rather than an ellipsoid suggests there is very little soft-iron interference.
On a final note if you are looking for buy the LSM303DLH then also look into the more recent LSM303DLM which has a greater accuracy.
The compass is now working properly so I'm happy!